i4D - scene understanding demo
Project of MTA SZTAKI
Street object recognition by Velodyne Lidar
In urban environments, object recognition and road monitoring are key issues for driving assistance systems or autonomous vehicles. This paper presents a LIDAR-based perception system which provides reliable detection of 3D urban objects from point cloud sequences of a Velodyne HDL-64E terrestrial LIDAR scanner installed on a moving platform. As for the output of the system, we perform real-time localization and identification of typical urban objects, such as traffic signs, vehicles or crosswalks. In contrast to most existing works, the proposed algorithm does not use hand-labeled training datasets to perform object classification. Experimental results are carried out on real LIDAR measurements in the streets of Budapest, Hungary.
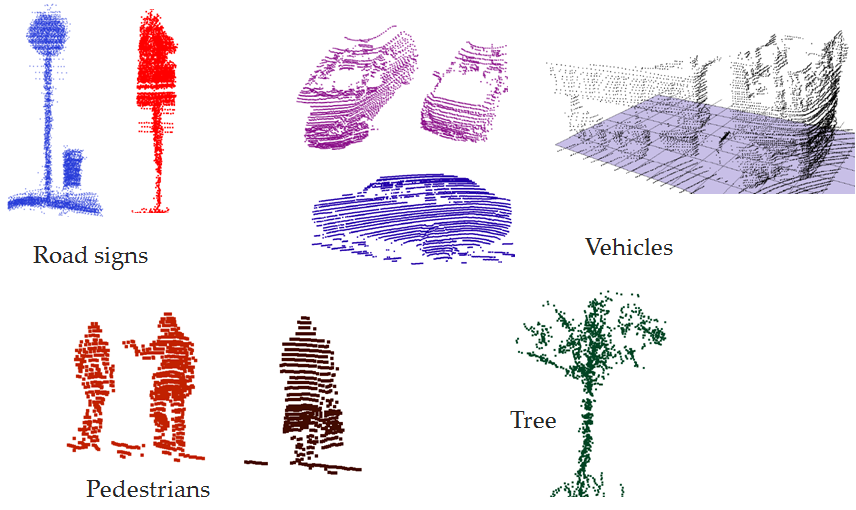 Figure. Street object recognition results
Figure. Street object recognition results
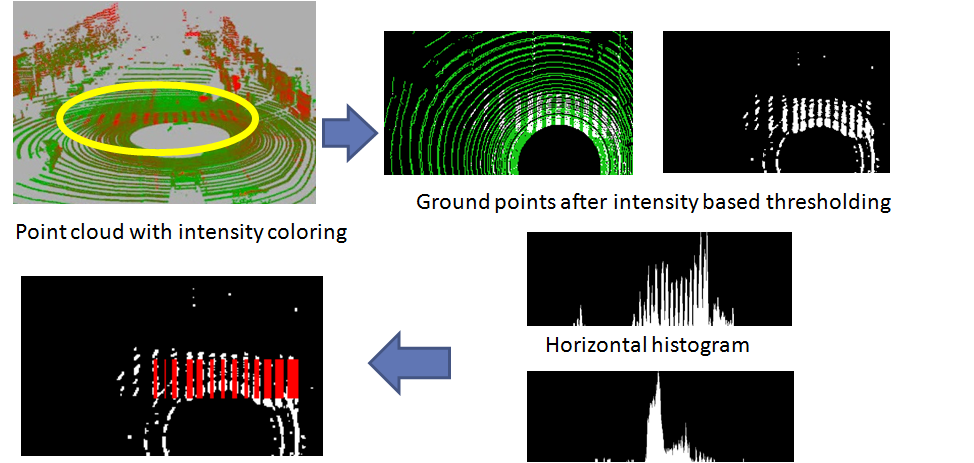 Figure. Zebra crossing detection
Figure. Zebra crossing detection
Reference
A. Börcs, B. Nagy and Cs. Benedek "On board 3D Object Perception in Dynamic Urban Scenes," IEEE International Conference on Cognitive Infocommunications, pp. 515 - 520, Budapest, Hungary 2013 ![]()