i4D - Virtual City Modeling
Project of MTA SZTAKI
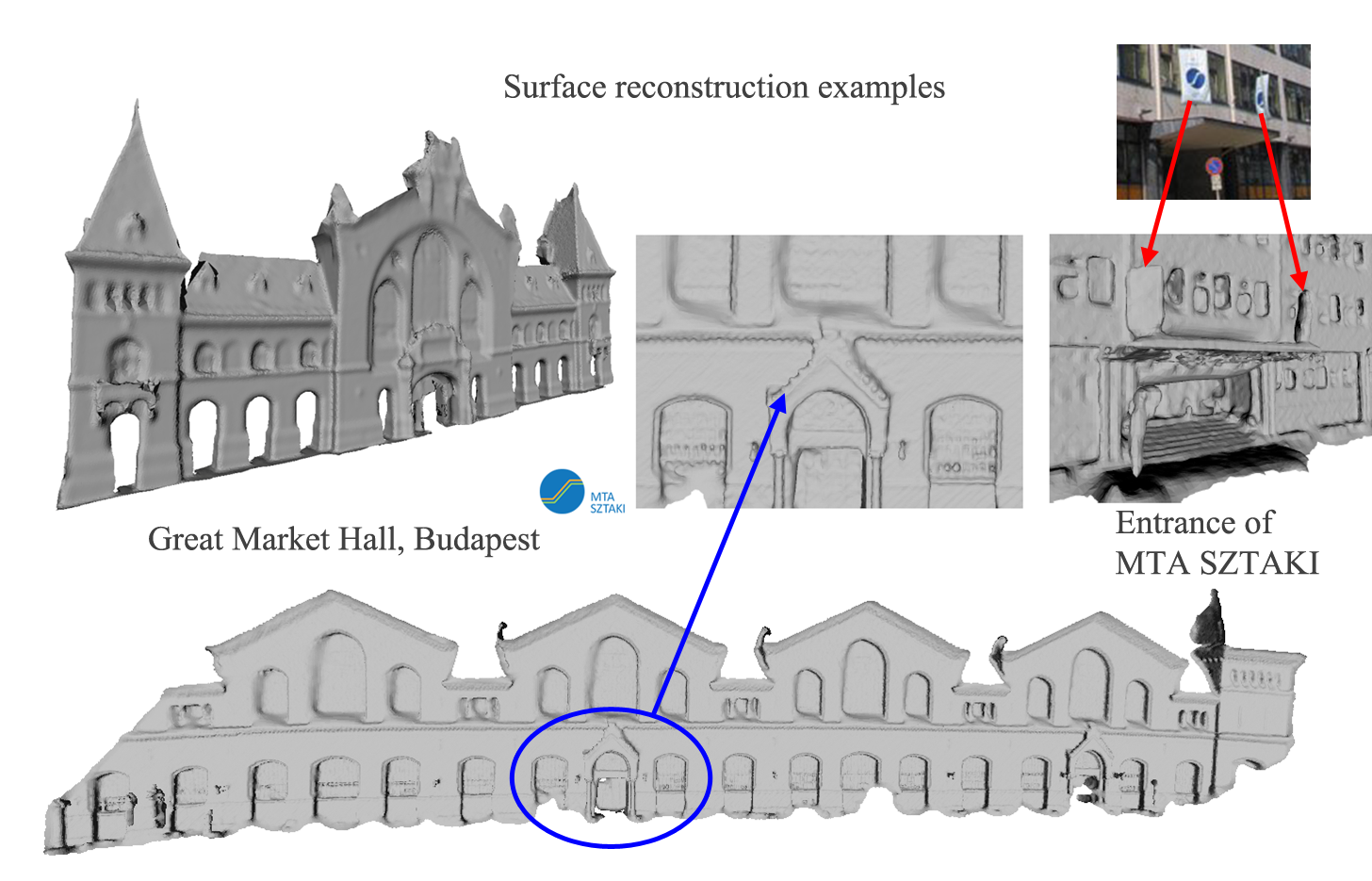
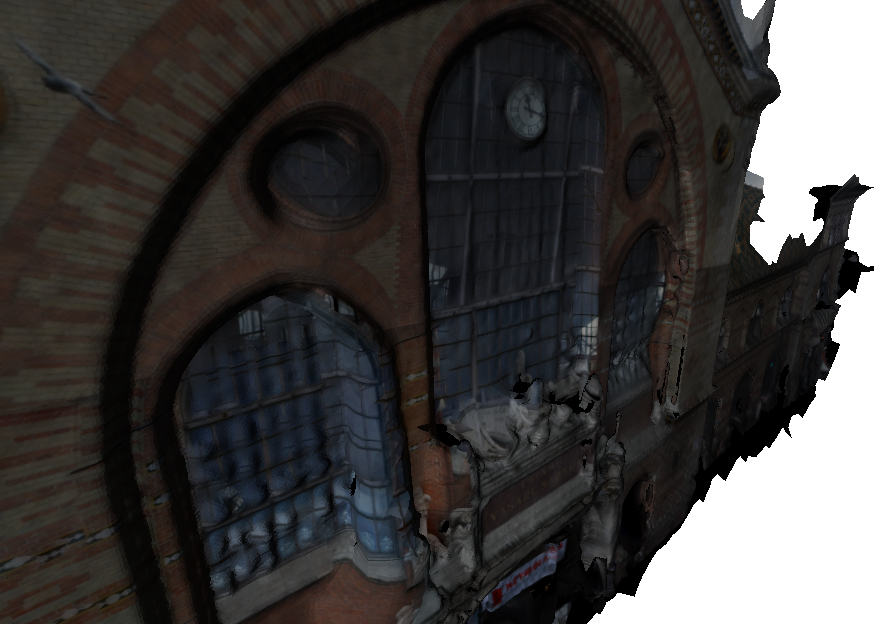
Virtual city modeling: 3D facade reconstruction and texturing
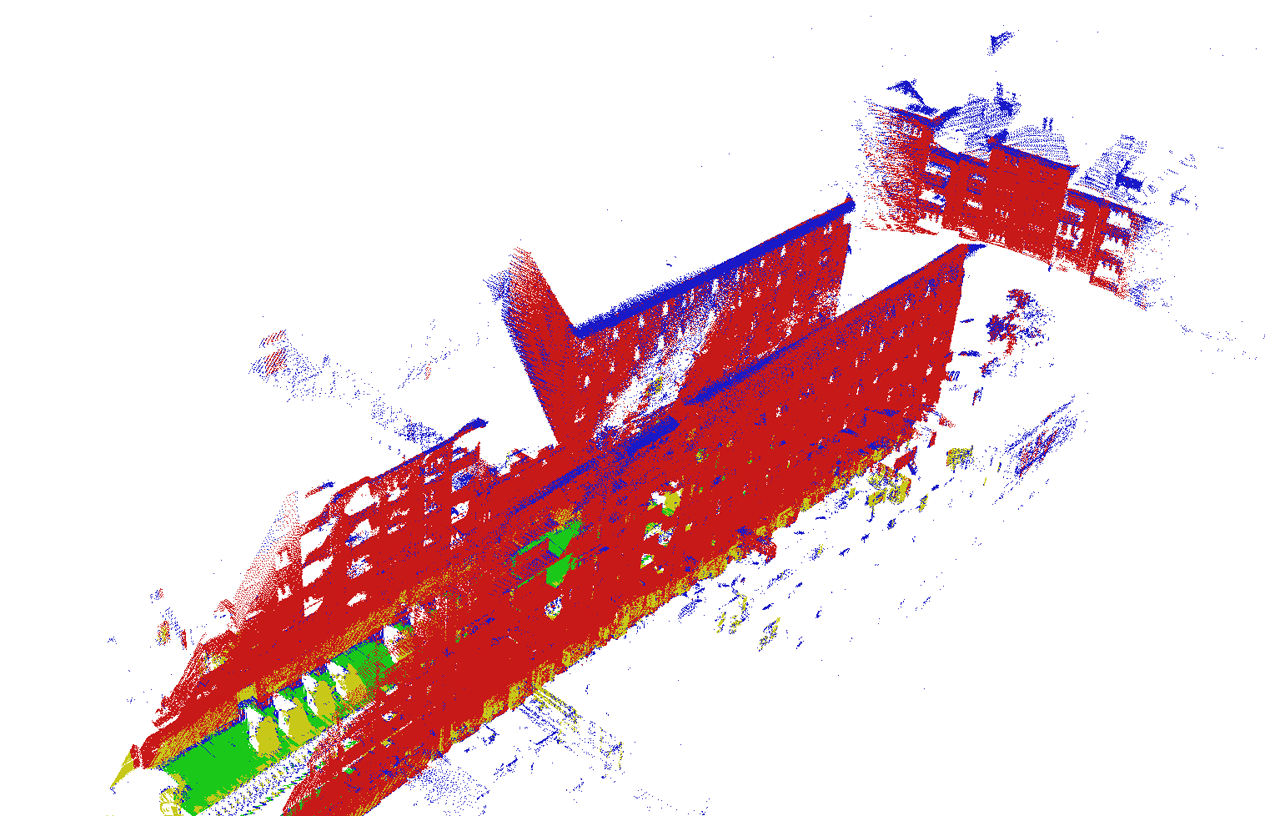
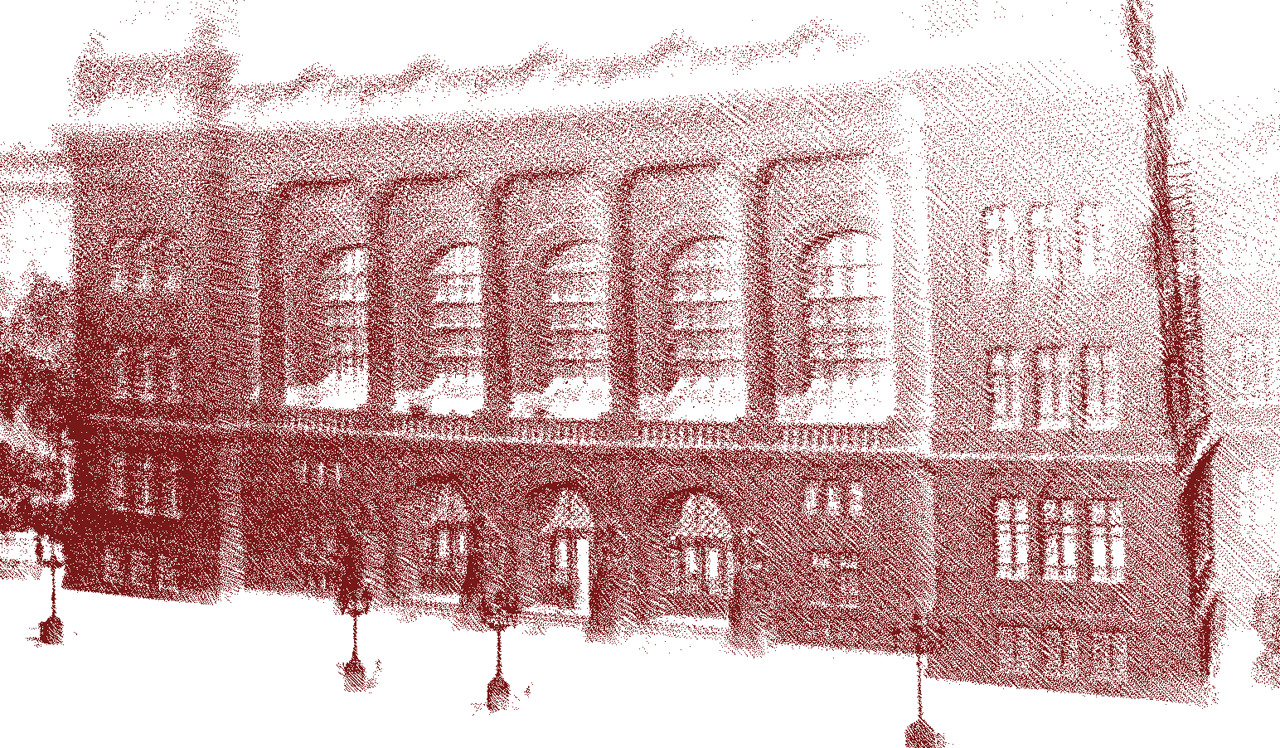
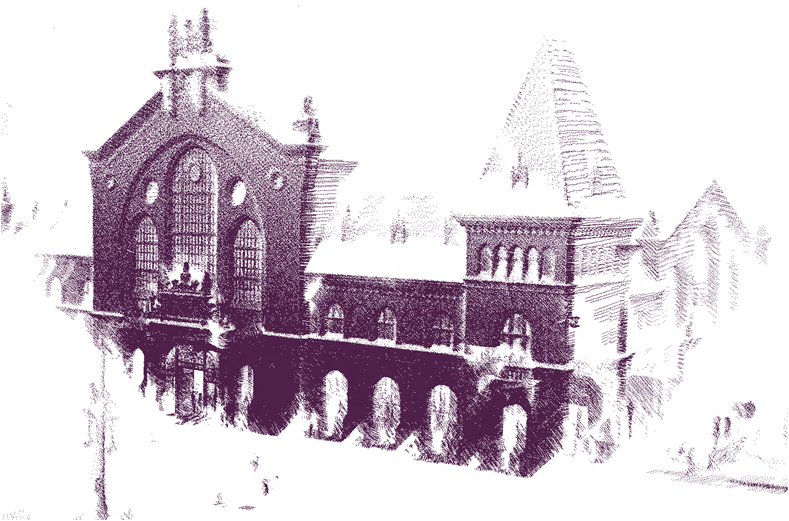
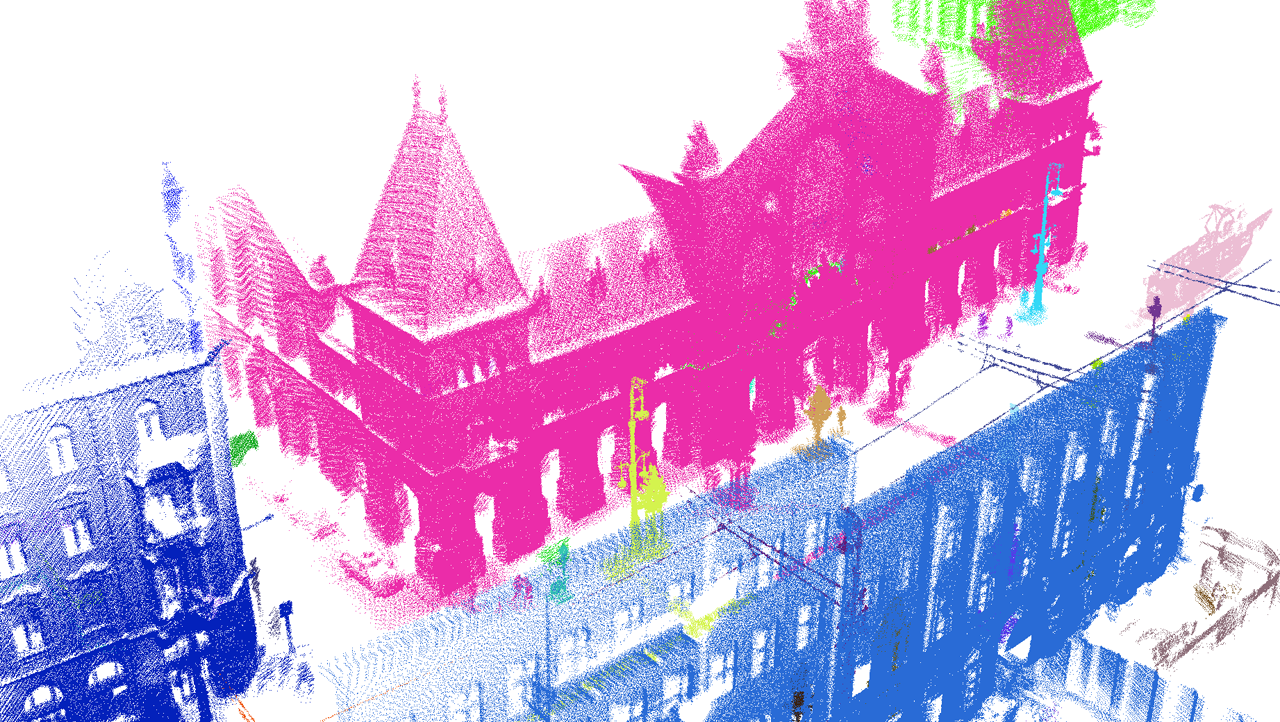
In this page, we demonstrate the virtual city reconstruction module of the i4D system. The presented point clouds and triangle meshes have been constructed by using a single Velodyne HDL-64E Lidar sensor which is mounted on the top of a moving car, i.e. neither GPS nor IMU devices have been utilized. Roofs of buildings are obtained by aerial Lidar measurements provided by Infoterra-Hungary under the DUSIREF Project. Texturing has been done in an offline mode with recorded photos.
Gallery on landmark representation by point clouds and meshes