i4D - integrated 4D
Project of MTA SZTAKI
Introduction
The integrated4D (i4D) project encapsulates various R&D activities of the Machine Perception Research Laboratory (MPLab) of MTA SZTAKI. The main objective of the project is to design and implement algoritms and system prototypes for the reconstruction and visualisation of complex spatio-temporal scenes by integrating various types of sensor measurements, including outdoor 4D point cloud sequences recorded by car-mounted Velodyne HDL-64E or Riegl VZ-400/VMX-450 LIDAR sensor, and 4D models of moving actors obtained in an indoor 4D Reconstruction Studio. The main purpose of the integration is our desire to measure and represent the visual world at different levels of detail. In particular, we aim to achieve scientific contributions and provide innovative practical solutions in the following application fields:
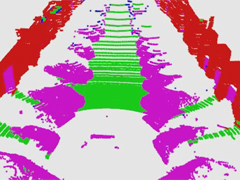
Road scene understanding for driving assistance and autonomous driving: we are able to automatically interpret the LIDAR point cloud stream obtained from a moving platform, segment different point cloud classes, detect and recognize various field objects Read more...
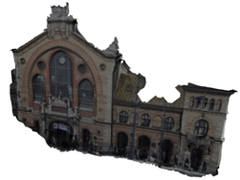
4D virtual city reconstruction: based on our intelligent mobile mapping system, we are able to perceive a dynamic environment, create geometrically reconstructed and textured 3D scene models, meanwhile we detect and analyse various static and moving field objects which are replaced by fixed or animated studio objects in the systhetized 4D city models. Read more...
4D video surveillance: we jointly exploit various depth sensors and optical cameras, to achieve high level object detection and classification, multiple people localization and tracking, event recognition a biometric identification tasks. Read more...
Processing fused data of mobile mapping systems: protecting collective properties in urban environment: we develop automated algoritms for monitoring various public premises, including road quality assessment, surveys of road marks and traffic signs, urban green area estimation, traffic analysis. Read more...
History
The i4D work project was launched in 2012 as a joint mission of the Distributed Events Analysis Research Laboratory (DEVA, which was the former name of MPLab) and the Geometric Modelling and Computer Vision Laboratory (GMCV), and funded by the Internal R&D Grant of MTA SZTAKI between 2012 and 2014. That time, Prof. Tamás Szirányi (DEVA) and Prof. Dmitry Chetverikov (GMCV) acted as research co-directors of the project, while Csaba Benedek and Zsolt Jankó led the technical developments from the Lidar and 4D Studio sides, respectively. Since the GMCV was closed in 2015, currently the MPLab operates the project with supervising both the Lidar and 4D Studio developments. Late 2014, the scope of the project was extended with research activities on Lidar-based road scene understanding, and with intelligent GIS development for measurements from mobile mapping systems (in collaboration with the Budapest Road Management Department)