i4D - demos and videos
Project of MTA SZTAKI
Demos on road scene understanding and autonomous driving
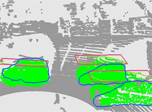
Object tracking from moving platform (new) for Velodyne HDL64 sensor Preliminary demo, to be published soon, 2016 |
|
 |
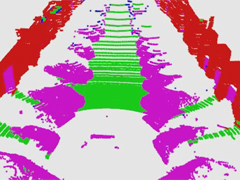
Object recognition with deep learning (new) for Velodyne HDL64 sensor Preliminary demo, to be published soon, 2016 |
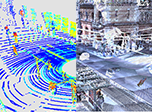 |
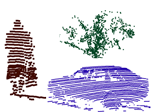
Crossmodal Point Cloud Registration for Mobile Laser Scanning Data (new) tested with Velodyne HDL64, VLP16 and Riegl VMX450 sensors Published @ International Conference on Pattern Recognition 2016 |
 |
GPS/IMU free SLAM for Velodyne HDL64 and VLP16 sensors (new) Published @ International Conference on Pattern Recognition 2016 |
|
|
 |
Fast 3-D Urban Object Detection on Streaming Point Cloud: we present a simple, yet efficient hierarchical grid data structure and corresponding algorithms that significantly improve the processing speed of the object detection task. Published @ Road Scene Understanding and Autonomous Driving at ECCV'14 |
|
|
 |
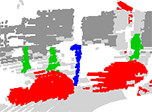
Zebra crossing and street object detection we perform real-time localization and identification of typical urban objects, such as traffic signs, vehicles or crosswalks. Published @ CogInfoCom 2013, |
 |
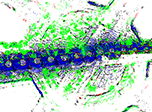
Point cloud filtering: vegetation detection, point cloud enhancement, and moving-static object separation Published @ IEEE Int'l Workshop on Content-Based Multimedia Indexing, 2013 |
 |
Data aquisition point cloud sequences are obtained from a moving vehicle, using a Velodyne HDL-64E Rotating Multi-Beam LIDAR sensor. |