 |
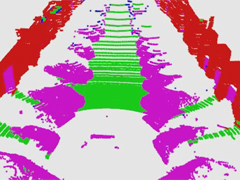
Road scene understanding and autonomous driving: we are able to automatically interpret the LIDAR point cloud stream obtained from a moving platform, segment different point cloud classes, detect and recognize various field objects |
 |
Virtual city modeling and moving person/crowd visualization: building facade and roof model reconstruction, texture polygon or colored point cloud visualization. |
|
4D video surveillance we jointly exploit various depth sensors and optical cameras, to achieve high level object detection and classification, multiple people localization and tracking, event recognition a biometric identification tasks.
|
 |
Processing measurements of mobile and terrestrial mapping systems (MLS/TLS): we develop automated algorithms for point cloud cleaning, monitoring various public premises, including road quality assessment, surveys of road marks and traffic signs, urban green area estimation, traffic analysis |
 |
4D people model generation: the dynamic models of walking pedastrians are prepared in the 4D Reconstruction Studio of MTA SZTAKI |
