Demos on Lidar based road scene understanding
Lidar based object tracking from a moving vehicle for Velodyne HDL64 sensor data |
|
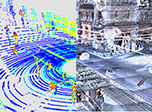 |
Crossmodal Point Cloud Registration for Mobile Laser Scanning Data tested with Velodyne HDL64, VLP16 and Riegl VMX450 sensors Published @ International Conference on Pattern Recognition 2016 |
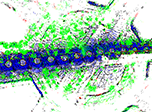 |
GPS/IMU free SLAM for Velodyne HDL64 and VLP16 sensors Published @ International Conference on Pattern Recognition 2016 |
|
|
 |
Fast 3-D Urban Object Detection on Streaming Point Cloud: we present a simple, yet efficient hierarchical grid data structure and corresponding algorithms that significantly improve the processing speed of the object detection task. Published @ Road Scene Understanding and Autonomous Driving at ECCV'14 |
|
|
 |
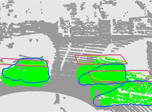
Zebra crossing and street object detection we perform real-time localization and identification of typical urban objects, such as traffic signs, vehicles or crosswalks. Published @ CogInfoCom 2013, |
 |
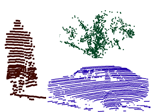
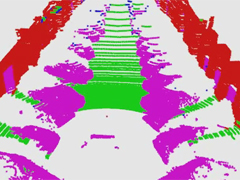
Point cloud filtering: vegetation detection, point cloud enhancement, and moving-static object separation Published @ IEEE Int'l Workshop on Content-Based Multimedia Indexing, 2013 |
 |
Data aquisition point cloud sequences are obtained from a moving vehicle, using a Velodyne HDL-64E Rotating Multi-Beam LIDAR sensor. |
Links
Geo-Information Computing @ Machine Perception Lab.
GeoComp Demos:
Contact
GeoComp Group leader: Dr. Csaba Benedek benedek.csaba@sztaki.hu
i4D project manager: Dr. Zsolt Jankó janko.zsolt@sztaki.hu
Head of MPLab: Prof. Tamás Szirányi
MPLab administration: Anikó Vágvölgyi
Address:
SZTAKIKende utca 13-17
H-1111 Budapest, Hungary Tel: +36 1 279 6194
Fax: +36 1 279 6292