GeoComp projects
Research Group on Geo-Information Computing (GeoComp)


Recent projects of the GeoComp group
- Ready2BIM, Planning of the renovation of residential buildings and adaption into the BIM workflow, 2018-2.1.3-EUREKA-2018-00032, (2019-2021)
- A HU-MATHS-IN – Magyar Ipari és Innovációs Matematikai Szolgáltatási Hálózat tevékenységének elmélyítése, EFOP 3.6.2-16-2017-00015, mini-project: Application of artificial intelligence techniques for situation analysis based on multimodal spatial data (2019-2021) - at the University of Debrecen
- Innovatív informatikai és infokommunikációs megoldásokat megalapozó tematikus kutatási együttműködések, EFOP-3.6.2-16-2017-00013, Subproject: Geospatial data processing, at the Péter Pázmány Catholic University
- INSTGEO - NKFIH K-16, (2016-2020), Project #120233
- i4D film preproduction system
Projects of the Machine Perception Lab with major contributions of the GeoComp group
- zMed - GINOP 3.2.2 VR for system medical applications (Csaba Benedek is the technical project leader and Zsolt Jankó is a WP leader for SZTAKI, 2017-2021)
- Knorr-Bremse - industrial R&D collaboration in the topic of Lidar based road understanding (2017-2018)
- SZTAKI Lab for Autonomous Vehicles
Past important projects
- GEOFUSION - NKFIH KH-17, (2017-2019), Project #125681
- EMG - Building insulation planning (2017-2018)
- GreHill project - industrial project on 3D geometric modeling (2017-2019)
- i4D - integrated 4D
- Remote Sensing (PD-OTKA), Project #101598
- RODIS - Traffic sign recognition
GEOFUSION
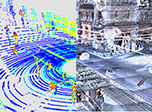
GEOFUSION (Change detection and event recognition with fusion of images and Lidar measurement)
Various key aspect of machine-based environment interpretation are the automatic detection and recognition of objects, obstacle avoidance in navigation, and object tracking in certain applications. Integrating visual sensors, such as video cameras, with sensors providing direct 3D spatial measurements, such as Lidars may offer various benefits (high spatial and temporal resolution, distance, color or illumination invariance). However, fusing the different data modalities often implies sensor specific unique challenges. Since the data characteristics provided by the recently appeared 3D laserscanners is significantly different from earlier sensors, the options of data fusions are not widely exploited yet in the literature. On the other hand, the results are not only interesting from a scientific point of view, but they also provide useful information regarding possible future utilization, which may mean benefits for hardware manufacturers.
Another set of critical problems are dynamic event recognition and change detection. The research article counted as the basis of the proposal contains important preliminary results regarding this aspect, presenting various Markovian change detection methods based on feature fusion. The article compared direct feature-differencing based techniques to post classification comparison approaches, which experiences can be highly utilized in the project by generalization to 3D data processing. The project will also offer possibilities to gifted undergraduate and PhD students to join the addressed research work, in particularly for master students of the Pázmány Catholic University, and the Budapest University of Technology and Economics
Project details:
- Funding entity: Hungarian National Research, Development and Innovation Fund (NKFIA)
- Call: K-17 Call for Research Groups with Significant International Impact (KH-17 call), project sheet
- Duration: 2017-2019 (24 months),
- Principal investigator: Dr. Csaba Benedek
Demos and publications
Coming soon.
INSTGEO
INSTGEO (Instant environment perception from a mobile platform with a new generation geospatial database background)
Up to date 3D sensors revolutionized the acquisition of environmental information. 3D vision systems of self driving vehicles can be used for -apart from safe navigation- real time mapping of the environment, detecting and analyzing static (traffic signs, power lines, vegetation, street furniture), and dynamic (traffic flow, crowd gathering, unusual events) scene elements. The onboard 3D sensors - Lidar laser scanners, calibrated camera systems and navigation sensors - record high frame-rate measurement sequences, however due to their limited spatial resolution, various occlusion effects in the 3D scenes, and the short observation time caused by the vehicle's driving speed, environment analysis purely based on onboard sensor measurements exhibits significant limitations.
The new generation geo-information systems (GIS) store extremely detailed 3D maps about the cities, consisting of dense 3D point clouds, registered camera images and semantic metadata. Here great challenges are also present yet, due to the large expenses of the environment scanning missions, the cost of evaluation of the tremendous data quantity, implementation of quick querying, and efficient updating of the semantic databases.
The main goal of the project is to facilitate the joint exploitation of the measurements from the cars' instant sensing platforms and offline spatial database content of the newest GIS solutions. We propose a new algorithmic toolkit which allows self driving cars to obtain in real time relevant GIS information for decision support, and provides opportunities for extending and updating the GIS databases based on the sensor measurements of the vehicles in the everyday traffic.
Project details:
- Funding entity: Hungarian National Research, Development and Innovation Fund (NKFIA)
- Call: K-16 researcher initiated projects, project sheet
- Duration: 2016-2020 (48 months),
- Principal investigator: Dr. Csaba Benedek
Demos and publications
i4D Preproduction System
The integrated 4D (i4D) Preproduction System (i4D-PS) aims to support a complete storyboard designing workflow by enabling one to synthesize and visualize virtual 3D scenes from real and fictional elements. An efficient 3D preview can be obtained from large scale dynamic scenarios, which can be recorded from arbitrary viewpoints, while both the scene elements and the virtual camera configurations can be freely modified by the end-users. The finished i4D Storyboard can be viewed as a clip from which precise technical data can be derived to assist efficient filmmaking.
Project details:
- Project type: propotype development project funded by the internal R&D grant pf MTA SZTAKI
- Project manager: Dr. Zsolt Jankó
Demos and details
- Project website
EMG - Building insulation planning
Subject: Application development for 3D point cloud processing
Bacgkround: taking 3D point clouds of buildings (prepared by a FARO Focus x330 laser scanner), the goal of the project is to analyse the building facades in automatic or semi-automatic manner. The analsys includes the recognition and separation of special facade elements (windows, walls, ledges), and calculation of the surface area of the different facade segments, to help insulation planning with pre-defined panels.
Project details:
- Funding: industrial project funded by EMG Group Zrt.
- Technical officer (project leader): Dr. Csaba Benedek
i4D - integrated 4D
The integrated4D (i4D) project of MTA SZTAKI was a joint mission of the Distributed Events Analysis Research Laboratory (DEVA) and the Geometric Modelling and Computer Vision Laboratory (GMCV). The main objective of the project was to design and implement a pilot system for the reconstruction and visualisation of complex spatio-temporal scenes by integrating two different types of data: outdoor 4D point cloud sequences recorded by a car-mounted Velodyne HDL-64E LIDAR sensor, and 4D models of moving actors obtained in an indoor 4D Reconstruction Studio. The main purpose of the integration was our desire to measure and represent the visual world at different levels of detail.
Project staff:
- Funding: internal R&D grant of MTA SZTAKI
- Project duration: 2012-2014 (24 months)
- Project manager: Dr. Csaba Benedek (also acted as technical coordinator and senior researcher)
- Project co-leader: Zsolt Jankó (supervisor of the 4D studio)
- Research director: Prof. Tamás Szirányi, Prof. Dmitry Chetverikov
Demos and publications
Remote sensing PD-OTKA
OTKA #101598 "Comprehensive Remote Sensing Data Analysis, was a postdoctoral project funded by the Hungarian Scientific Research Fund between Jan. 2012 and Dec. 2014 (36 months).
Outline: Earth observation is a growing field of interest in various application areas, such as monitoring agricultural activity, detection of pollution and environmental crimes, management of urban area expansion, crisis management, including civil protection, or homeland security. However, the evaluation of the collected remotely needs exhausting human intervention up to now due to the rich and continuously augmenting content and various aspects of assessment. For this reason, necessity of automated recognition problems in remote sensing is raised by both national and international demands.
The work focuses on the research towards a generalized framework and procedure library for representing different targets, hierarchic structures and various levels of changes using remotely sensed 2-D images and 3-D (LIDAR, ISAR or DEM) data. The developed methods attempt to collect similar tasks appearing in different application areas, and handle them in a joint methodological approach. An important feature of the proposed models will be the separation of the data and application dependent elements from the abstract hierarchical structure which has various levels, such as pixel, region, object, object group and land cover class. Task definitions will origin from specific applications, followed by problem grouping, abstraction and generalization.
Project staff:
- Funding entity: Hungarian Scientific Research Fund (OTKA)
- Principal investigator : Dr. Csaba Benedek
- Duration: 01/2012-12/2014 (36 months)
- Student participants: Attila Börcs, Csaba Horváth, Oszkár Józsa, Péter Polcz, Balázs Nagy
Demos and publications
Featured results: Multi-level Object Population Analysis with an Embedded Marked Point Process model, with applications of automatic traffic monitoring and built-in area analysis. Change detection survey.
RODIS - Traffic sign recognition
We developed automated algorithms which help in monitoring various public premises, including road quality assessment, surveys of road marks and traffic signs, urban green area estimation, traffic analysis. Our partner with experience in GIS developments based on mobile laser scanning was the Department of Road Management of Budapest (Budapest Közút Zrt), which had recently launched the RODIS (ROad Data Information System) for providing an integrated solution for mobile and terrestrial LIDAR scanning of large city areas, an efficient 3D geo database capture system using even CAD solution for GIS data production, as well as complete GIS data publication and visualization for 3D data.
Project staff:
- Funding: industrial project funded by Budapest Közút Zrt. (Budapest Department of Road Management)
- Technical project leader: Dr. Csaba Benedek
- Project duration: 2014-2015 (12 months)
Links
Geo-Information Computing @ Machine Perception Lab.
GeoComp Demos:
Contact
GeoComp Group leader: Dr. Csaba Benedek benedek.csaba@sztaki.hu
i4D project manager: Dr. Zsolt Jankó janko.zsolt@sztaki.hu
Head of MPLab: Prof. Tamás Szirányi
MPLab administration: Anikó Vágvölgyi
Address:
SZTAKIKende utca 13-17
H-1111 Budapest, Hungary Tel: +36 1 279 6097