GeoComp benchmarks
Research Group on Geo-Information Computing (GeoComp)
Ground Truth datasets
This page contains three benchmark sets (raw data + ground truth) for different Geo-Information computing applications.
Terms of usage:
The benchmark sets are free for scientific use.
- Please acknowledge the use of the benchmark by referring to the relevant publications as indicated
- Please notify us if a publication using the benchmark set appears.
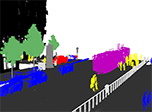 |
SZTAKI-CityMLS is a Point Cloud dataset (SZTAKI-CityMLS), created for the purpose of evaluating 3D semantic point cloud segmentation algorithms in urban environments, based on mobile laser scanning (MLS) measurements of a Riegl VMX-450 mobile mapping system. |
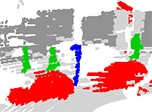 |
SZTAKI-Velo64Road urban object dataset, created for the purpose of evaluating object recognition algorithms in urban environments based on real time Lidar measurements. |
 |
SZTAKI Lidar Gait-and-Activity (SZTAKI-LGA) database for evaluating gait based person identification and activity recognition algorithms in multi-pedestrian environments based on real time measurements of a Velodyne HDL 64-E sensor |
|
|
 |
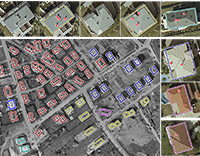
Masonry Wall Image Analysis Benchmark is an image dataset for training and evaluation of methods for semantic analysis and documentation of masonry wall images, performing in parallel automatic detection and virtual completion of occluded or damaged wall regions, and brick segmentation. |
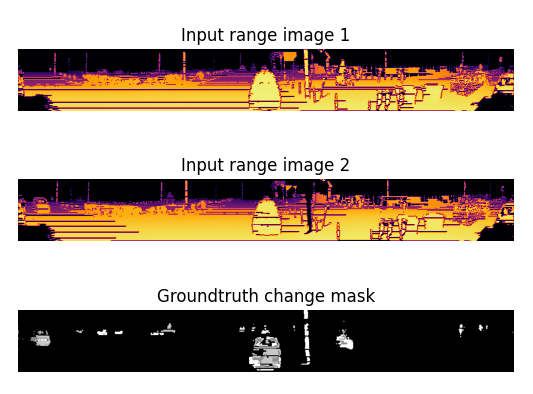 |
Change3D-SZTAKI is a Point Cloud dataset, created for the purpose of evaluating 3D semantic point cloud change detection algorithms in urban environments, based on Velodyne HDL-64E measurements. |
Links
Geo-Information Computing @ Machine Perception Lab.
GeoComp Demos:
Contact
GeoComp Group leader: Dr. Csaba Benedek benedek.csaba@sztaki.hu
i4D project manager: Dr. Zsolt Jankó janko.zsolt@sztaki.hu
Head of MPLab: Prof. Tamás Szirányi
MPLab administration: Anikó Vágvölgyi
Address:
SZTAKIKende utca 13-17
H-1111 Budapest, Hungary Tel: +36 1 279 6194
Fax: +36 1 279 6292