GeoComp benchmarks
Research Group on Geo-Information Computing (GeoComp)
SZTAKI City MLS Point Cloud dataset (SZTAKI-CityMLS)
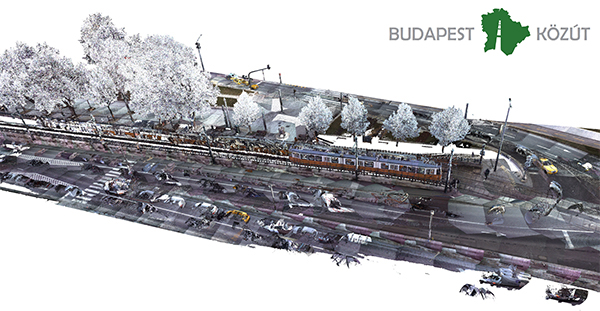
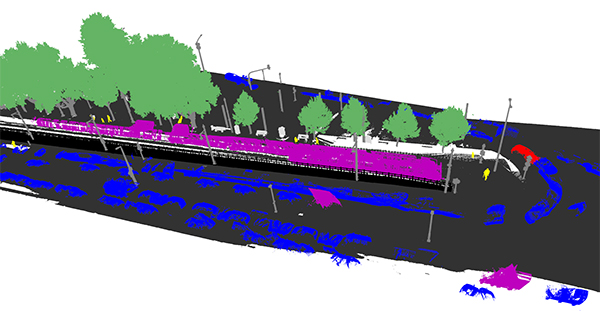
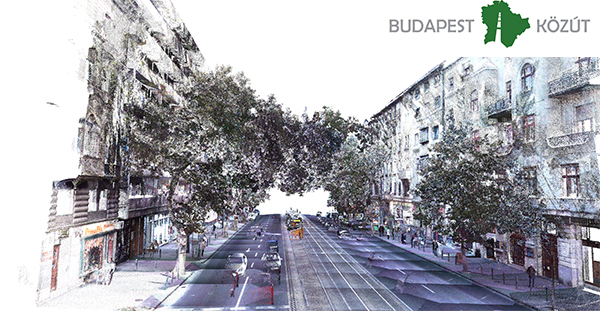
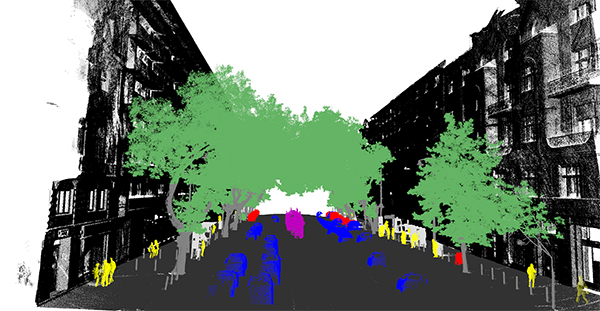
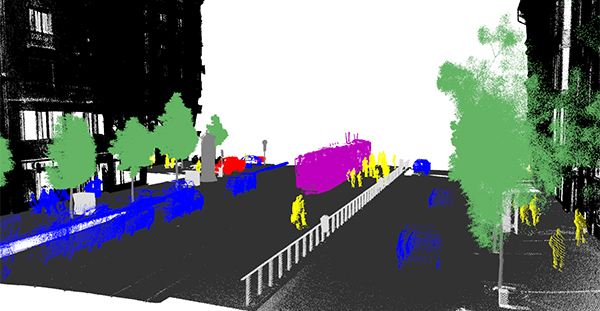
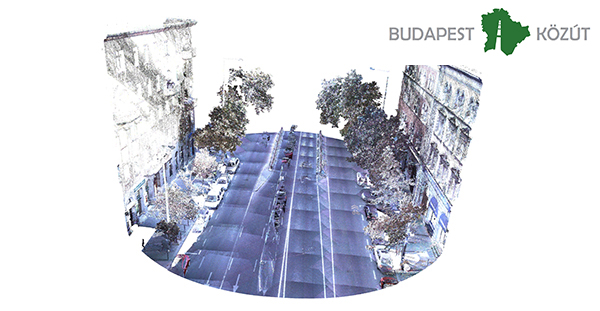
The SZTAKI City MLS Point Cloud dataset (SZTAKI-CityMLS) has been created by the authors of [1] for the purpose of evaluating 3D semantic point cloud segmentation algorithms in urban environments, based on mobile laser scanning (MLS) measurements of a Riegl VMX-450 mobile mapping system. The database can be downloaded here. Test data has been provided by Budapest Közút Zrt.
CityMLS object dataset descrption
For the evaluation of the method proposed in [1] we created a new hand labeled dataset, called SZTAKI-CityMLS.
Images from sample point clouds:
 |
 |
 |
 |
 |
 |
 |
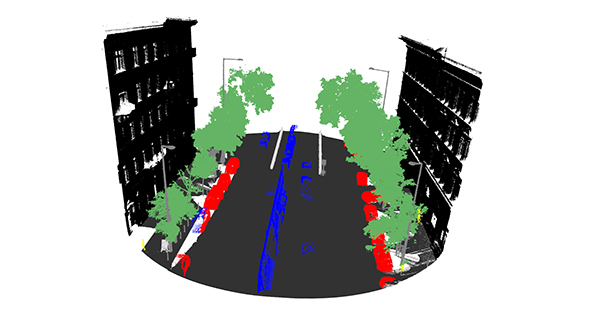 |
Classes for annotation: phantom, tram/bus, predestrian, car, vegetation, column, street furniture, ground, building facade
Dataset download
Download the SZTAKI-CityMLS dataset (around 6GB).
For password, please fill a "term-of-use" agreement (doxc or pdf) and send it to Balázs Nagy, balazs.nagy.it@gmail.com
Reference
[1]B. Nagy and Cs. Benedek: ”3D CNN Based Semantic Labeling Approach for Mobile Laser Scanning Data,” IEEE Sensors Journal, vol. 19, no. 21, pp. 10034 - 10045, 2019, Open Access ![]()
Links
Geo-Information Computing @ Machine Perception Lab.
GeoComp Demos:
Contact
GeoComp Group leader: Dr. Csaba Benedek benedek.csaba@sztaki.hu
i4D project manager: Dr. Zsolt Jankó janko.zsolt@sztaki.hu
Head of MPLab: Prof. Tamás Szirányi
MPLab administration: Anikó Vágvölgyi
Address:
SZTAKIKende utca 13-17
H-1111 Budapest, Hungary Tel: +36 1 279 6194
Fax: +36 1 279 6292